🎲 Parameter Randomization#
MotrixSim provides Domain Randomization capabilities, allowing you to set different physical parameters for each instance in multi-environment parallel simulations. This is essential for Sim-to-Real transfer and reinforcement learning training.
Supported Randomization Parameters Overview#
Property |
Object |
Setter |
Getter |
Data Shape |
|---|---|---|---|---|
Mass |
|
|
|
|
Center of Mass |
|
|
|
|
Friction |
|
|
|
|
Geom Size |
|
|
|
|
Armature |
|
|
|
|
Frictionloss |
|
|
|
|
Kp Gain |
|
|
|
|
Damping (Kd) |
|
|
|
|
Gravity |
|
|
|
|
Note
All override methods act on SceneData and do not modify the SceneModel itself. This allows the same model to use different parameters across different instances.
Core Concept#
Parameter randomization is implemented through the Override API. Overrides act on SceneData rather than SceneModel, meaning different simulation instances of the same model can have different physical parameters without reloading the model.
Basic usage pattern:
# Create batch simulation data
data = mtx.SceneData(model, batch=(16,))
# Get model object
link = model.get_link("body_name")
# Set override (shape includes batch dimension)
mass = np.random.uniform(0.1, 10.0, size=(16,))
link.set_mass_override(data, mass)
# Read override
mass_get = link.get_mass_override(data)
Supported Randomization Parameters#
Link Parameters#
Mass Randomization#
Use Link.set_mass_override to modify link mass, affecting inertia and gravitational behavior.
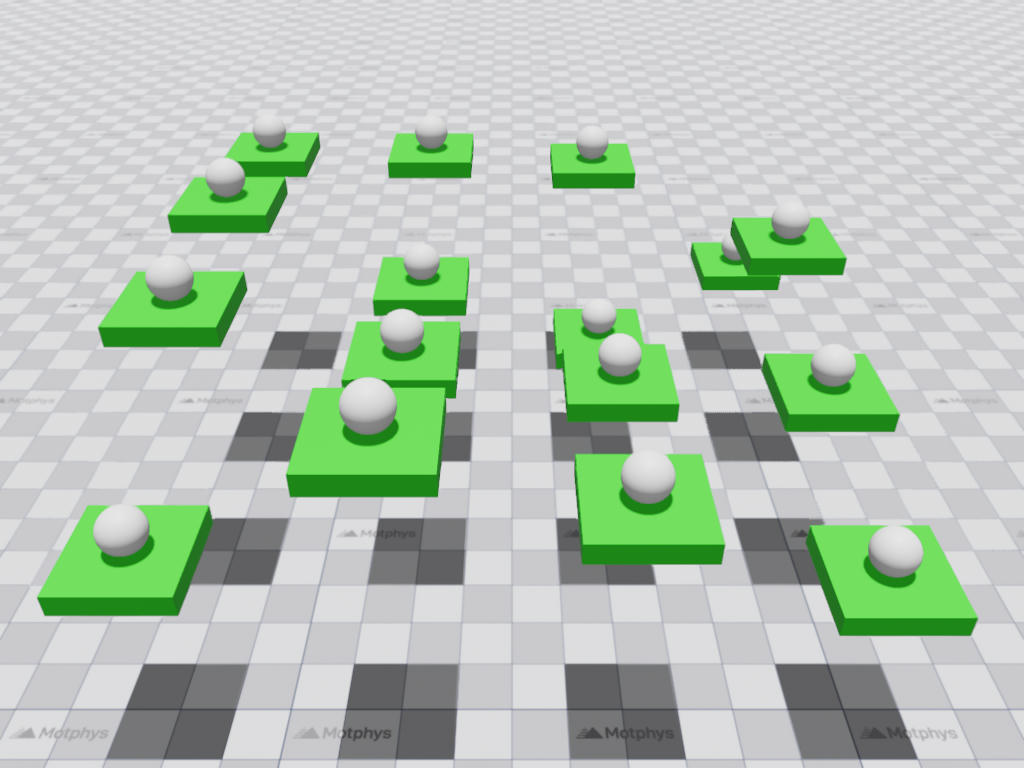
def main():
# Create render window for visualization
with RenderApp() as render:
# The scene description file
path = "examples/assets/randomize/ball_on_box.xml"
# Load the scene model
model = load_model(path)
# Create the render instance of the model
render_offset = []
for i in range(4):
for j in range(4):
render_offset.append([-i * 2, j * 2, 0])
render.launch(model, batch=16, render_offset=render_offset)
render.system_camera.set_view(lookat=[-3, 3, 1.5], distance=10.0, elevation=-35, azimuth=90)
# Create the physics data of the model
data = SceneData(model, batch=(16,))
ball = model.get_link(0)
mass = np.random.uniform(0.1, 500.0, size=(16,))
ball.set_mass_override(data, mass)
mass_get = ball.get_mass_override(data)
assert np.allclose(mass_get, mass)
Full example: examples/randomize/mass.py
Center of Mass Randomization#
Use Link.set_center_of_mass_override to modify link center of mass position, affecting rotational behavior and stability.
com_offset = np.zeros((16, 3), dtype=np.float32)
com_offset[:, 0] = np.random.uniform(-0.25, 0.25, 16)
link.set_center_of_mass_override(data, com_offset)
Full example: examples/randomize/com.py
Geometry Parameters#
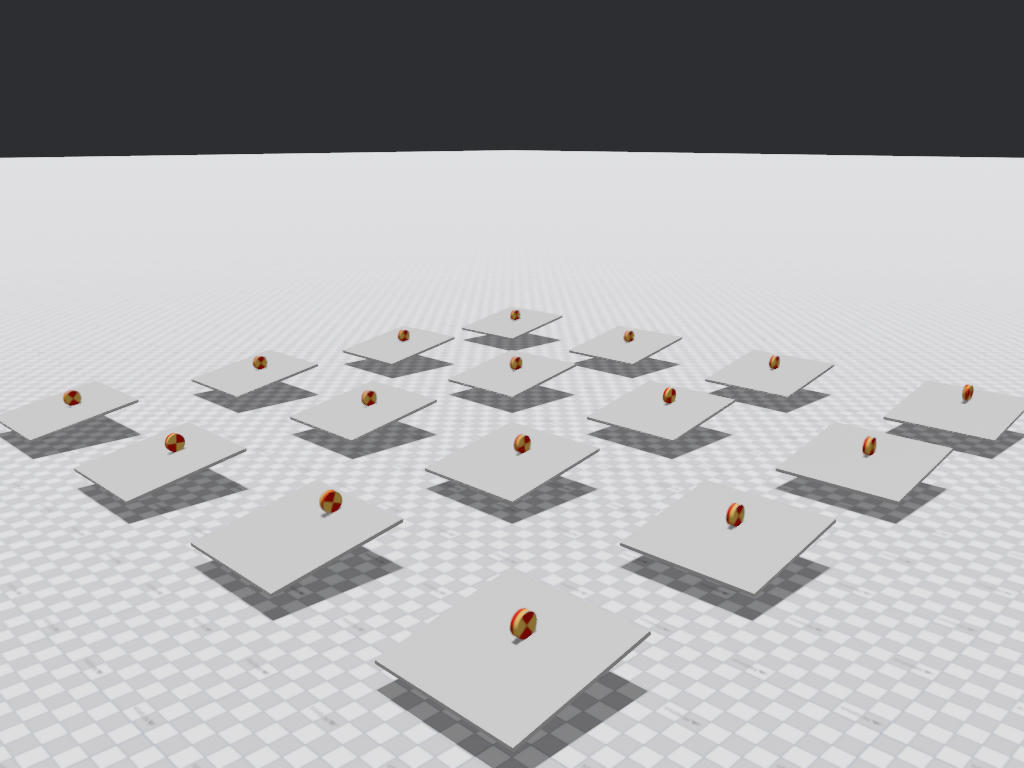
Friction Randomization#
Use Geom.set_friction_override to modify geometry friction coefficients. The friction is a 3D vector (slide, spin, roll).
geom = model.get_geom("box_geom")
frictions = np.zeros((16, 3), dtype=np.float32)
frictions[:, 0] = np.linspace(0.01, 2.0, 16) # slide friction
geom.set_friction_override(data, frictions)
Full example: examples/randomize/friction.py
Geometry Size Randomization#
Use the set_size_override method on geometry subclasses to modify collision shape sizes. Different geometry types have different size dimensions:
Geometry Type |
Size Dims |
Meaning |
|---|---|---|
|
1 |
Radius |
|
2 |
Radius, half-height |
|
3 |
X/Y/Z half-extents |
|
2 |
Radius, half-height |
|
3 |
X/Y/Z semi-axes |
from motrixsim import GeomSphere
sphere = model.get_geom("sphere")
assert isinstance(sphere, GeomSphere)
radii = np.random.uniform(0.1, 0.8, size=(16, 1)).astype(np.float32)
sphere.set_size_override(data, radii)
Full example: examples/randomize/geom_size.py
Joint Parameters#
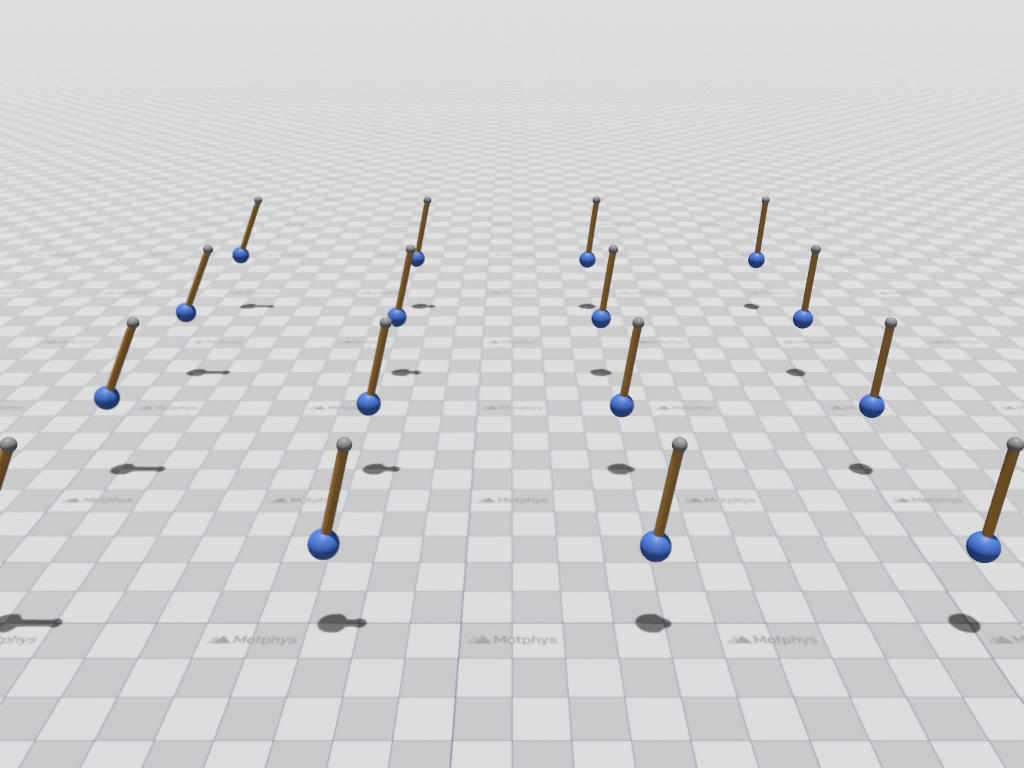
Armature Randomization#
Use Joint.set_armature_override to modify joint armature (virtual rotor inertia), affecting joint dynamic response speed.
joint = model.get_joint("rotor_joint")
armature = np.linspace(0.1, 5.0, 16).astype(np.float32)
joint.set_armature_override(data, armature)
Full example: examples/randomize/armature.py
Joint Frictionloss Randomization#
Use Joint.set_frictionloss_override to modify Coulomb dry friction at the joint, affecting joint resistance characteristics.
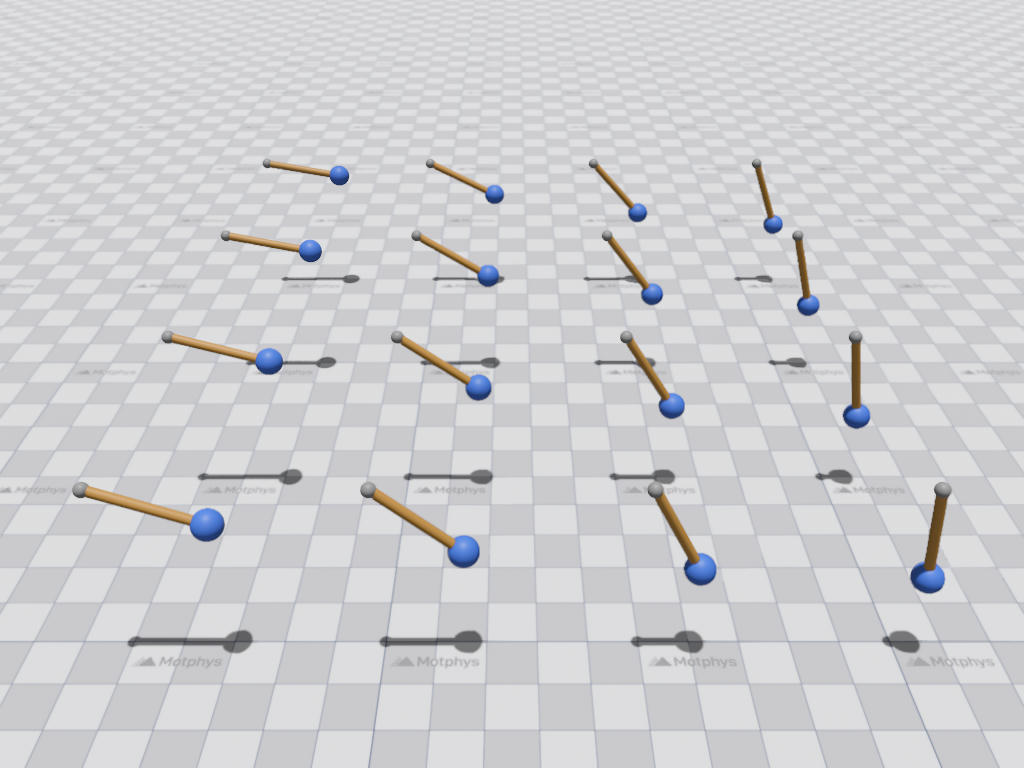
joint = model.get_joint("pendulum_hinge")
frictionloss = np.linspace(0.0, 200.0, 16).astype(np.float32)
joint.set_frictionloss_override(data, frictionloss)
Full example: examples/randomize/frictionloss.py
Actuator Parameters#
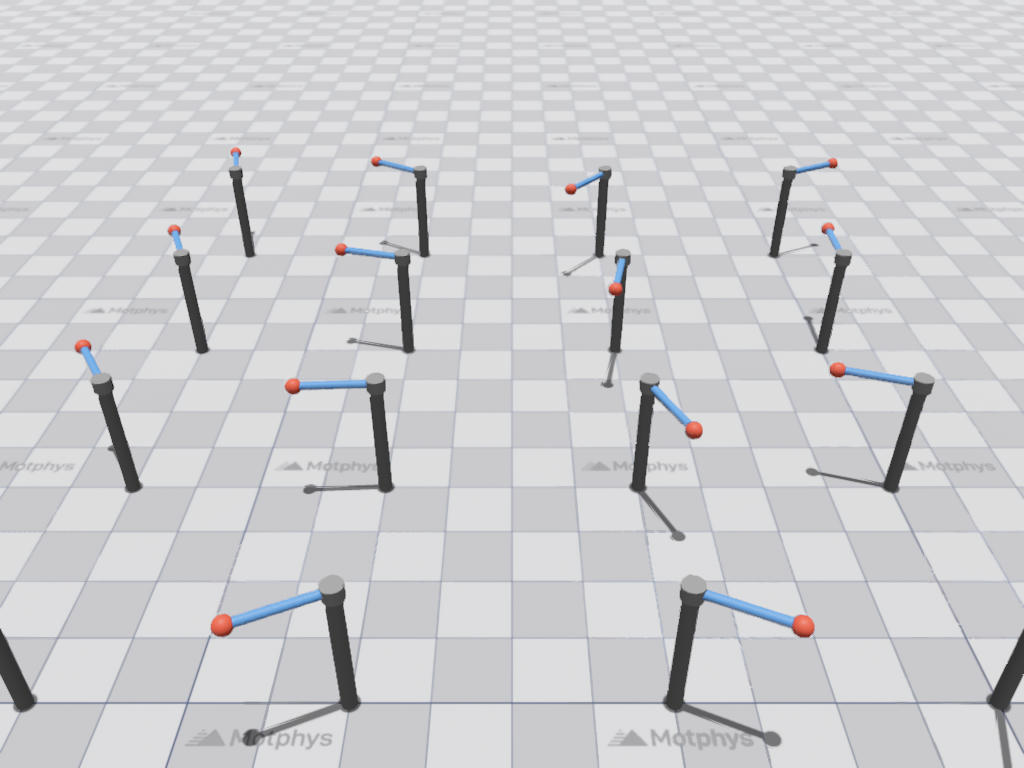
Kp/Kd Randomization#
Use Actuator.set_kp_override and Actuator.set_damping_override to modify the proportional and derivative gains of position actuators.
actuator = model.get_actuator("servo")
kp = np.array([10.0, 30.0, 60.0, 120.0], dtype=np.float32)
kd = np.array([1.0, 3.0, 8.0, 20.0], dtype=np.float32)
actuator.set_kp_override(data, kp)
actuator.set_damping_override(data, kd)
Full example: examples/randomize/actuator_kp_kd.py
Scene Parameters#
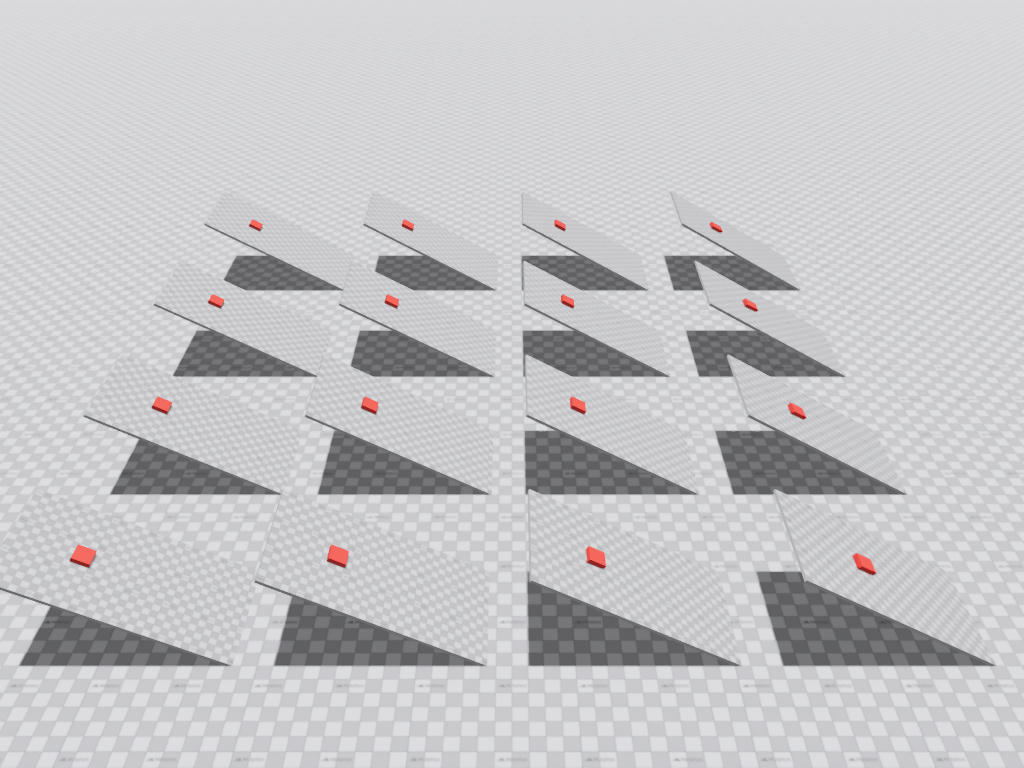
Gravity Direction Randomization#
Use SceneModel.set_gravity_override to modify the gravity vector for each instance.
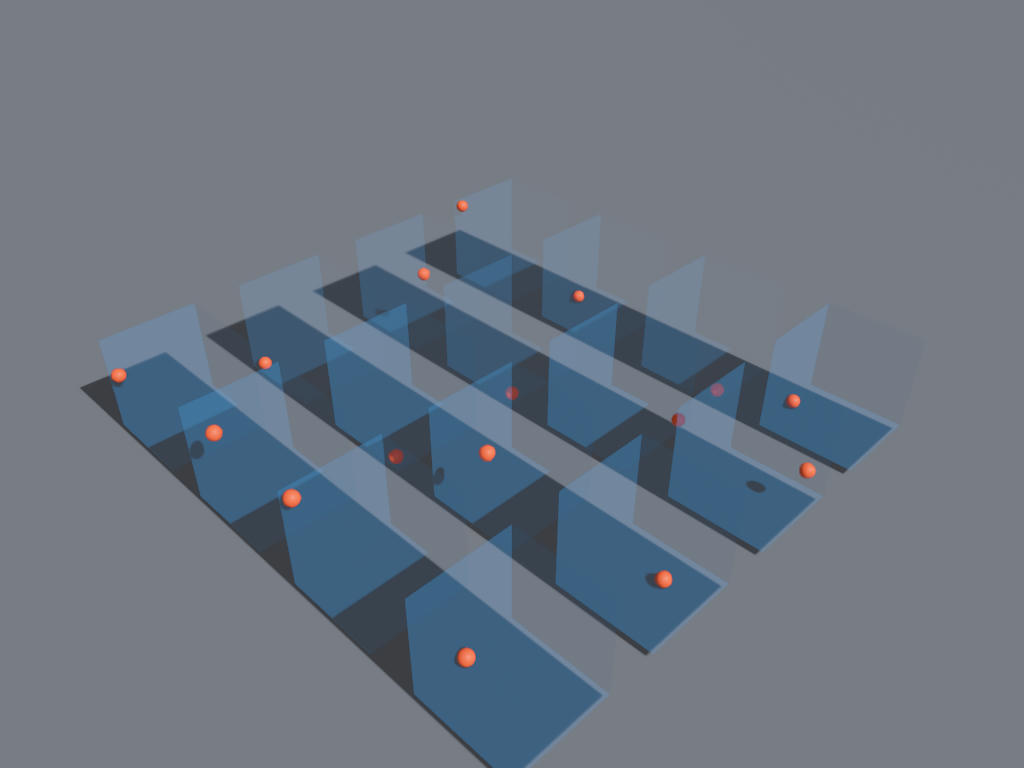
gravity = np.random.randn(16, 3).astype(np.float32)
gravity /= np.linalg.norm(gravity, axis=1, keepdims=True)
gravity *= 9.81
model.set_gravity_override(data, gravity)
Full example: examples/randomize/gravity_direction.py