🎮 交互式查看器#
概述#
交互式查看器提供了一个简化的接口,用于快速可视化和交互物理仿真。viewer.launch() 函数以阻塞模式运行,这意味着在查看器窗口关闭之前,它不会将控制权返回给你的 Python 代码。这种阻塞行为能够实现精确的物理循环时序和自动化的仿真处理。
与需要手动同步和循环管理的底层 RenderApp API 不同,交互式查看器会自动处理仿真循环、渲染同步和常用的 UI 控制。
使用场景#
交互式查看器专为以下场景设计:
快速可视化模型:用最少的代码测试和检查物理仿真
交互式调试:使用内置播放控件检查仿真行为
教学演示:专注于物理概念而无需处理渲染复杂性
原型开发:快速迭代模型设计和行为
简单应用:当不需要自定义渲染逻辑或非阻塞执行时
对于需要对仿真循环进行细粒度控制的生产应用,请考虑使用 RenderApp。
主要特性#
阻塞执行:运行直到窗口关闭,支持精确的物理循环时序
自动仿真循环:物理步进和渲染自动处理
内置控件:开箱即用的播放/暂停、重置、单步执行和速度控制
多种调用模式:支持空会话、仅模型、模型和数据三种模式
文件加载:直接将 XML 模型文件拖入查看器窗口即可即时加载
零配置:使用合理的默认值即可工作,但在需要时可自定义
命令行接口#
交互式查看器也可以直接从命令行启动:
# 使用指定模型文件启动
uv run python -m motrixsim.interactive_viewer --file=path/to/your/model.xml
# 启动空查看器(拖放模型文件即可加载)
uv run python -m motrixsim.interactive_viewer
CLI 参数#
参数 |
必需 |
描述 |
|---|---|---|
|
否 |
模型文件路径。如果不提供,将启动空查看器,可以通过拖放模型文件加载。 |
示例#
# 使用指定模型启动查看器
uv run python -m motrixsim.interactive_viewer --file=examples/assets/boston_dynamics_spot/scene_arm.xml
# 启动空查看器进行拖放交互
uv run python -m motrixsim.interactive_viewer
CLI 提供了一种无需编写 Python 代码即可快速可视化模型的方式。当提供文件参数时,它会自动:
加载指定的模型
创建具有初始状态的场景数据
运行几个物理步骤以稳定仿真
启动交互式查看器
不带参数启动时,你可以直接将 XML 模型文件拖入查看器窗口即可即时加载。
备注
如需对初始条件或自定义回调进行更多控制,请直接使用 Python API 的 viewer.launch()。
使用模式#
viewer.launch() 函数支持三种不同的调用模式以适应不同的使用场景:
1. 空会话(默认模型)#
import motrixsim as mx
# 使用默认演示模型启动
mx.viewer.launch()
使用默认演示模型启动交互式可视化会话。这是探索查看器功能最快捷的方式。
提示: 你还可以直接将 XML 模型文件拖入查看器窗口来即时加载,这样可以轻松快速预览不同的模型,无需编写代码。
2. 仅模型#
import motrixsim as mx
# 加载你的模型
model = mx.load_model("path/to/your/model.xml")
# 启动查看器 - 将自动创建内部 SceneData
mx.viewer.launch(model)
为给定模型启动可视化会话。查看器会在内部自动创建自己的 SceneData 实例用于仿真。
3. 模型和数据#
import motrixsim as mx
from motrixsim import SceneData
# 加载模型并创建数据
model = mx.load_model("path/to/your/model.xml")
data = SceneData(model)
# 配置初始状态
data.qpos[:] = initial_positions
data.qvel[:] = initial_velocities
# 使用初始数据启动查看器
mx.viewer.launch(model, data)
使用提供的 SceneData 实例作为仿真的初始状态。查看器会为其仿真循环创建数据的内部副本。此模式在以下情况下很有用:
设置特定的初始条件(位置、速度、控制输入)
在可视化之前运行稳定步骤
从特定的仿真状态启动查看器
预仿真示例#
在启动查看器之前运行一些物理步骤以稳定初始状态:
# This example uses the Boston Dynamics Spot robot with arm to demonstrate
# the interactive viewer with a model that includes actuators
model = mx.load_model("examples/assets/boston_dynamics_spot/scene_arm.xml")
data = SceneData(model)
for _ in range(20):
# Physics world step
step(model, data)
这种预仿真方法特别适用于:
允许初始接触力稳定
达到稳定的平衡配置
在可视化之前预计算派生量
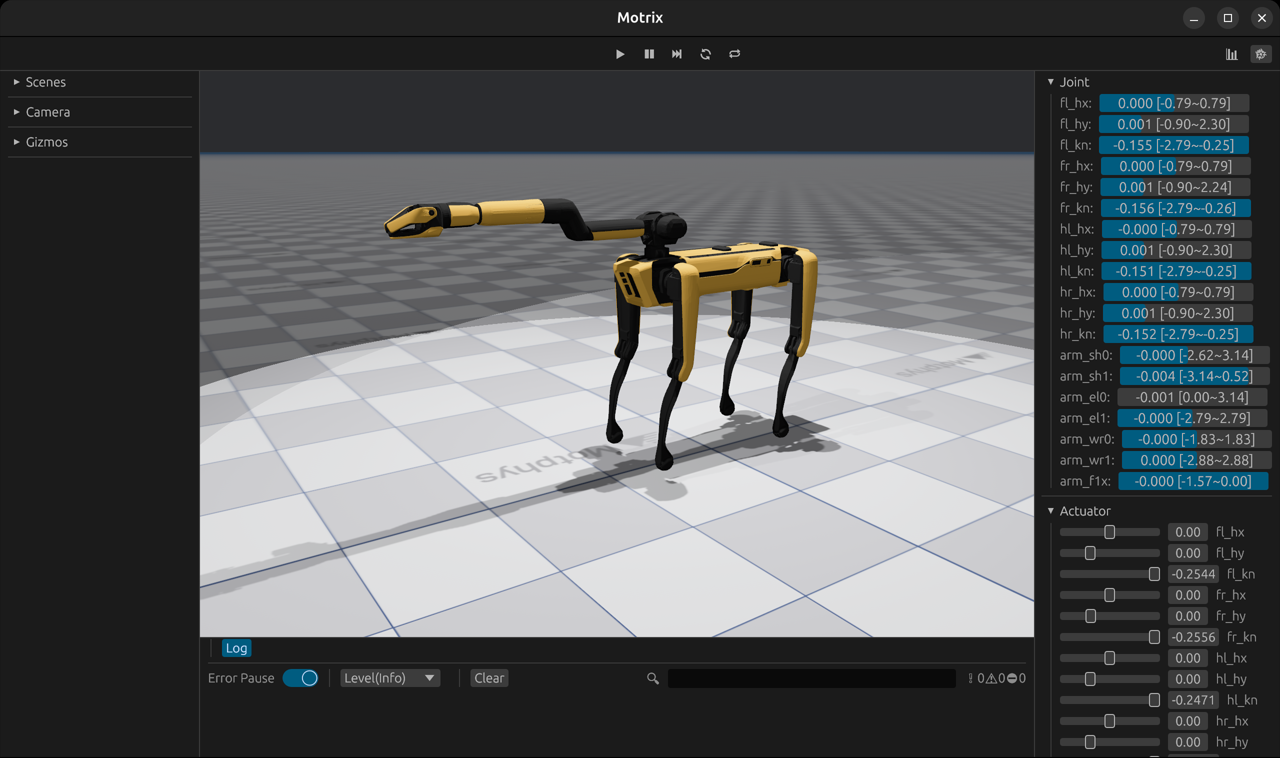
完整示例#
以下是一个使用波士顿动力 Spot 机器人演示交互式查看器的完整示例:
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# ==============================================================================
import motrixsim as mx
from motrixsim import SceneData, step, viewer
# Use default model and data
# viewer.launch()
# use custom model
# model = mx.load_model("examples/assets/body.xml")
# viewer.launch(model)
# Use custom model with empty data
# model = mx.load_model("examples/assets/body.xml")
# data = SceneData(model)
# viewer.launch(model, data)
# Use custom model with physics data
# This example uses the Boston Dynamics Spot robot with arm to demonstrate
# the interactive viewer with a model that includes actuators
model = mx.load_model("examples/assets/boston_dynamics_spot/scene_arm.xml")
data = SceneData(model)
for _ in range(20):
# Physics world step
step(model, data)
viewer.launch(model, data)
此示例:
加载带有机械臂的 Spot 机器人模型(包含执行器)
创建场景数据
运行 20 个物理步骤以稳定仿真
启动交互式查看器
内置控件#
交互式查看器提供了几个通过 UI 访问的内置控件:
控件 |
功能 |
|---|---|
播放/暂停 |
启动或暂停仿真 |
重置 |
将仿真重置为初始状态 |
单步执行 |
将仿真推进一步(暂停时) |
速度控制 |
调整仿真速度(慢动作到快进) |
额外的鼠标控制:
左键拖拽:围绕焦点旋转相机
右键拖拽:移动焦点
鼠标滚轮:放大/缩小
小技巧
按空格键可以快速切换播放和暂停状态。
与 RenderApp 的对比#
交互式查看器和 RenderApp 服务于不同的使用场景:
特性 |
交互式查看器 |
RenderApp |
|---|---|---|
执行模式 |
阻塞(运行直到关闭) |
非阻塞(手动控制) |
仿真循环 |
自动 |
手动( |
同步 |
自动 |
手动( |
使用场景 |
快速可视化、原型开发 |
生产应用、自定义逻辑 |
控制流 |
查看器控制流程 |
你控制流程 |
自定义 |
有限 |
完全控制 |
何时使用#
使用交互式查看器:
快速测试或调试模型
创建教学演示
构建简单的交互式工具
你需要最少的代码
使用 RenderApp:
与现有应用程序逻辑集成
需要对渲染时机进行细粒度控制
构建生产应用程序
实现自定义 UI 或可视化
运行带有可选渲染的无头仿真
最佳实践#
模型加载#
# 好:绝对或相对路径
model = mx.load_model("examples/assets/boston_dynamics_spot/scene_arm.xml")
# 好:使用 pathlib 实现跨平台兼容性
from pathlib import Path
model_path = Path(__file__).parent / "assets" / "model.xml"
model = mx.load_model(str(model_path))
数据初始化#
# 初始化数据
data = SceneData(model)
# 设置初始配置
data.qpos[:] = initial_positions
data.qvel[:] = initial_velocities
# 运行几个步骤以稳定
for _ in range(10):
mx.step(model, data)
# 启动查看器
mx.viewer.launch(model, data)
限制和注意事项#
警告
交互式查看器是阻塞的 - 你的 Python 代码不会继续执行,直到查看器窗口关闭。如果你需要并发执行,请使用 RenderApp。
其他注意事项:
相关文档#
渲染器(RenderApp) - 具有完全控制的底层渲染 API
相机 - 相机控制和配置
组件部件 - 多视口渲染