🦾 反向运动学(IK)#
MotrixSim 提供了一个高效且易于使用的反向运动学(IK)求解器,位于motrixsim.ik模块中。
目前支持基于高斯-牛顿法的 IK 求解器(GaussNewtonSolver)和简单的 IK 链模型(IkChain)。
基本概念#
Inverse Kinematics (IK) 是计算机器人末端执行器(如机械臂手爪)位置和姿态所需的关节参数的过程。与之相对的是正向运动学(Forward Kinematics),它是通过已知的关节参数来计算末端执行器的位置和姿态。
用一个公式来表示 IK 计算过程就是: joint_dof_pos = compute_inverse_kinematic(ik_model, end_effector_pose)。
IK Model#
IK 模型用于定义 IK 问题的结构和约束。当前 MotrixSim 仅支持由单自由度关节(Hinge,Slide)组成的链式结构(IKChain)。
IK Chain#
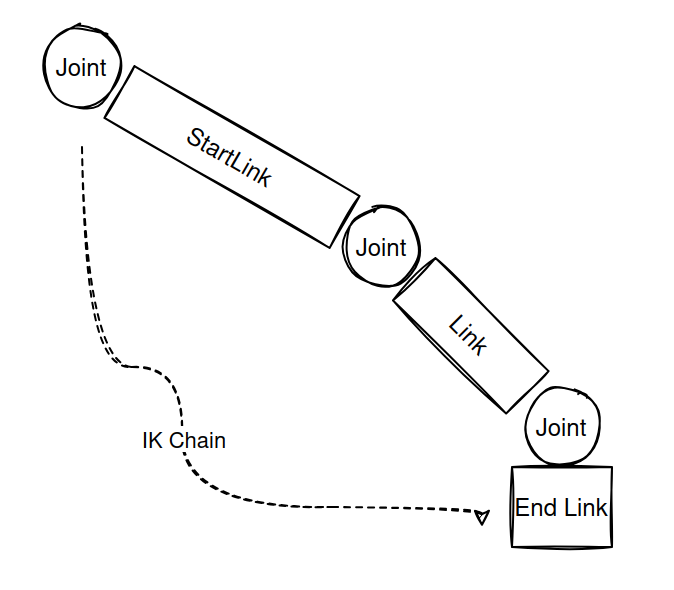
IK 链模型由一系列连接的关节和一个末端执行器组成, 如下图所示:
在 MotrixSim 中,您可以通过以下方式创建一个 IK 链模型:
chain = ik.IkChain(
model, end_link="base", start_link="gen3/base_link", end_effector_offset=[0.0, 0.0, 0.15, 0, 0, 0, 1]
)
以上代码通过指定末端连杆和可选的起始连杆来创建一个 IK 链模型。您还可以通过 end_effector_offset 参数来定义末端执行器相对于末端连杆的偏移。
您可以查看 API 文档了解更多关于 IkChain 的信息。
IK Solver#
在定义了 IKModel 之后,您可以使用 IK Solver 来做具体的 IK 求解工作。MotrixSim 目前支持基于高斯-牛顿法的 IK 求解器GaussNewtonSolver。
Gauss-Newton IK Solver#
高斯-牛顿法是一种用于非线性最小二乘问题的迭代优化算法。它通过线性化非线性函数并使用最小二乘法来更新参数估计,从而逐步逼近目标值。在 IK 求解中,高斯-牛顿法通过迭代调整关节参数,使得末端执行器的位置和姿态尽可能接近目标位置和姿态。
在 MotrixSim 中,您可以通过以下方式创建一个高斯-牛顿 IK 求解器:
solver = ik.GaussNewtonSolver(
max_iter=100,
step_size=0.5,
tolerance=1e-3,
)
然后通过调用 solve 方法来执行 IK 求解:
result = solver.solve(chain, data, target_pose)
# the first element is actual iteration number used, which may be less than max_iter
num_iter = result[0] # noqa: F841
# the second element is the final residual after iteration end.
residual = result[1]
# the remaining elements are the desired dof_pos
desired_dof_pos = result[2:]
if residual < 1e-3:
# in stanford_tidybot model, the first 3 actuators are for the mobile base,
# we only need to control the arm dof_pos.
ctrls = data.actuator_ctrls
ctrls[3:10] = desired_dof_pos
data.actuator_ctrls = ctrls
else:
print("IK not converged, err=", result[1])
solve 方法返回 numpy.ndarray 对象,其形状为(*data.shape, chain.num_dof_pos + 2). 其中 chain.num_dof_pos 是 IK 链的自由度数量,额外的两个元素分别表示求解器的收敛状态和迭代次数。
备注
IK Solver在进行求解时,可能会遇到无法收敛的情况,原因是多样的,例如:
目标位置超出了机械臂的工作空间
IK过程并没有考虑碰撞等限制
机械臂的初始姿态距离目标位置过远,无法在设定的迭代次数内收敛
....
查看完整代码请见 examples/ik.py