📚 示例程序#
我们提供了一系列示例程序帮助您从零开始掌握 MotrixSim 的使用方法。
在所有平台上(Linux、Windows、MacOS),您可以通过
uv run examples/{category}/{example_name}.py
来运行您感兴趣的示例
备注
关于 MacOS (aarch64-apple-darwin) 平台的特别说明:
如果示例使用了 🎨 渲染器,则需要使用:
uv run mxpython examples/{category}/{example_name}.py
如果示例不使用
RenderApp(仅进行物理仿真计算),则使用uv run即可,与其他平台一致
大多数需要可视化渲染的示例(如机械臂控制、机器人运动等)都会使用 RenderApp,需要使用 uv run mxpython。
基础入门#
展示 |
文件 |
简介 |
|---|---|---|
|
创建空场景,相当于 Hello World 示例。 |
|
|
小球在重力作用下下落,展示如何创建 |
|
|
从字符串加载 MJCF 模型,展示如何直接从 XML 字符串创建场景。 |
|
|
方块在斜坡上滚动的物理仿真模型。 |


物理仿真#
展示 |
文件 |
简介 |
|---|---|---|
|
获取和配置 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
使用 |
|
|
|
|
|
摩擦力配置的场景。 |
|
|
几何体相关 API 的使用,展示如何访问和查询几何体的位置、速度等信息。 |
|
|
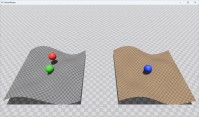
高度场 API 的使用,展示如何访问地形高度数据并进行统计分析。 |
|
|
组合多个 MSD 模型,展示如何使用 |
|
|
使用吸附功能的机械臂。 |
|
|
外力与外力矩施加示例,展示如何使用 |



控制#
展示 |
文件 |
简介 |
|---|---|---|
|
使用键盘操控小车移动,展示键盘事件的使用。使用 W 键向前移动,S 键向后移动。转向:使用 A 键向左转,D 键向右转。 |
|
|
使用鼠标点击地面移动小球,展示鼠标事件的使用。 |
|
|
展示如何使用 MotrixSim 内置的 IK 模块进行逆运动学求解。 |
|
|
由简单几何形状和 |
|
|
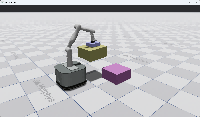
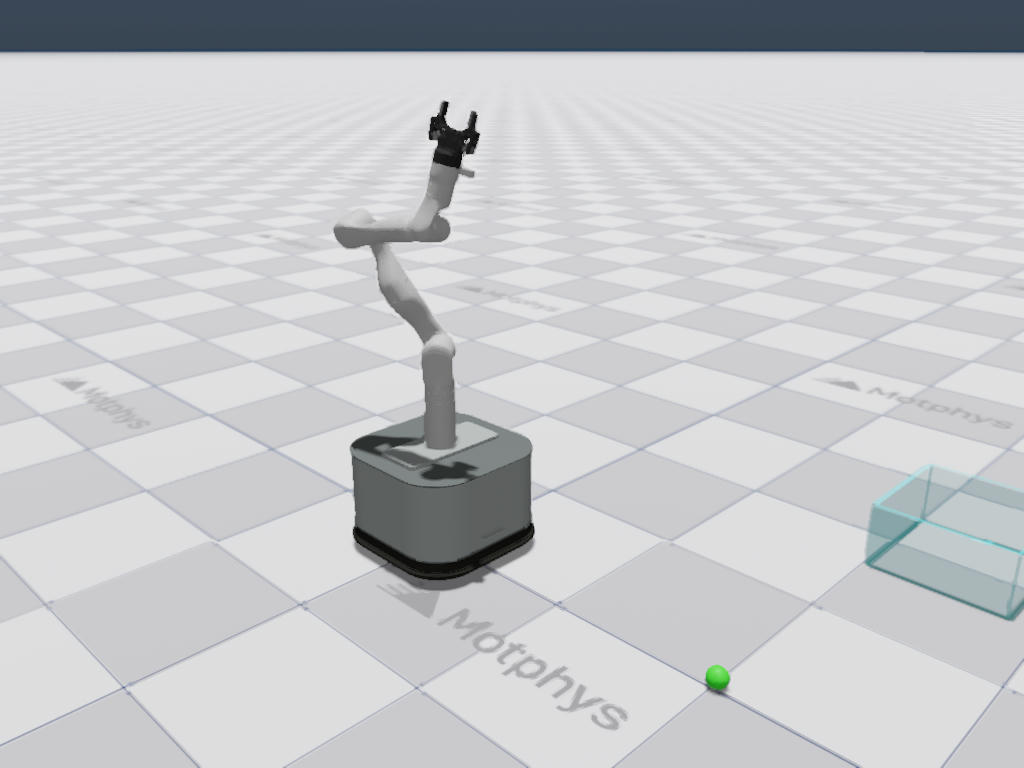
斯坦福机械臂使用移动命令序列进行小球的抓取与摆放。 |
|
|
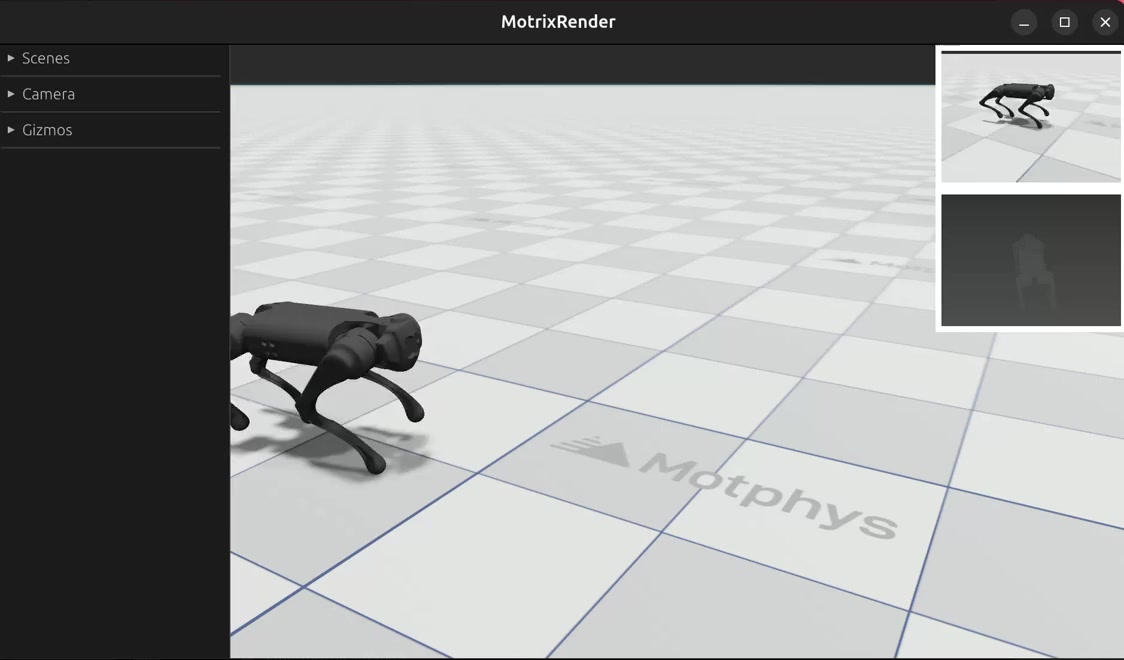
go1 机械狗的随机运动,展示如何引入神经网络和使用 |
|
|
go2 机械狗的键盘控制示例,方向键和wasd控制机械狗行走与转向。使用 |
|
|
g1 人形机器人的键盘控制示例,方向键和wasd控制机器人行走与转向。使用 |
|
|
g1 人形机器人的运动跟踪播放示例,加载内置 motion 参考轨迹和 ONNX actor 进行单环境播放。使用 |
|
|
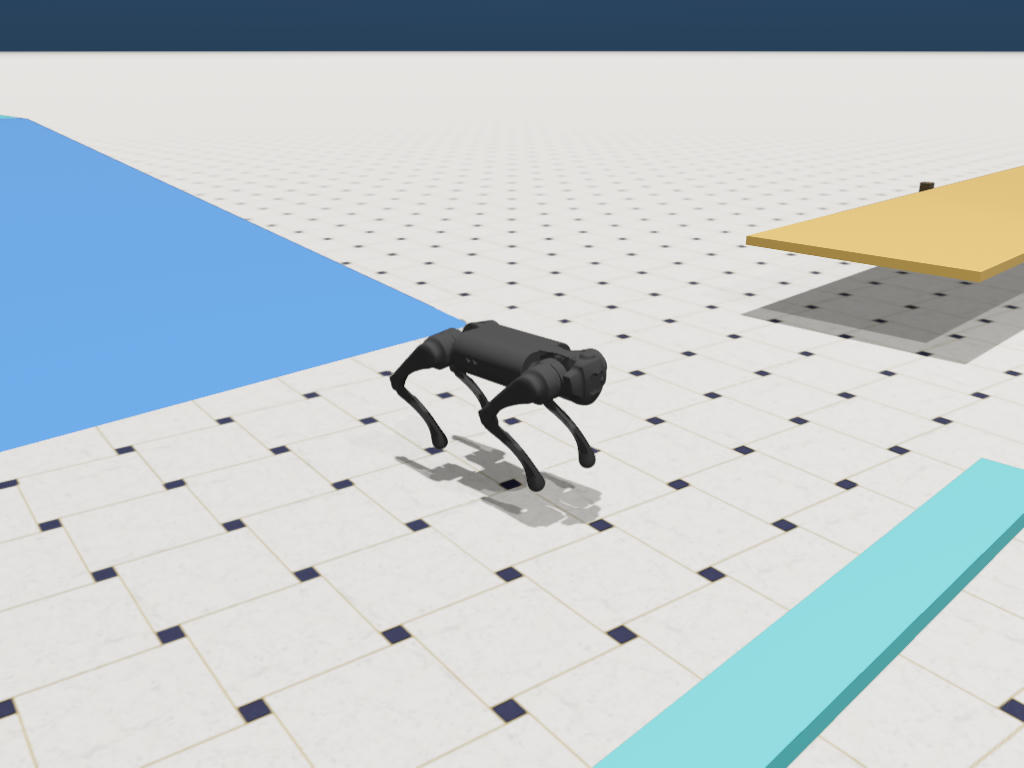
g1 人形机器人在室内客厅场景的键盘控制示例,方向键和wasd控制机器人行走与转向。使用 |
|
|
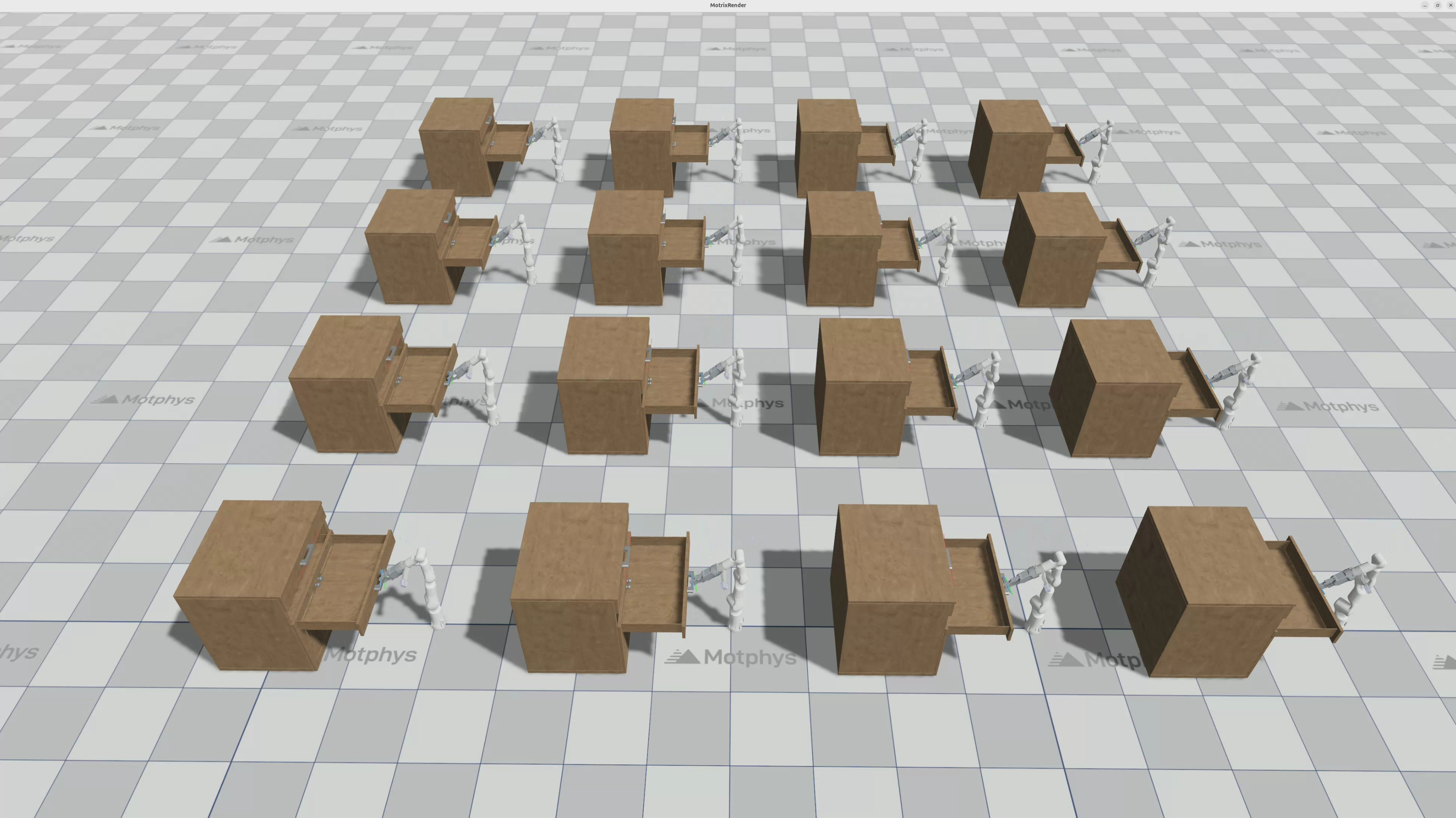
RM65 开抽屉策略示例,展示如何加载 ONNX 策略并控制机械臂完成柜体抽屉操作。演示视频。按 |
|
|
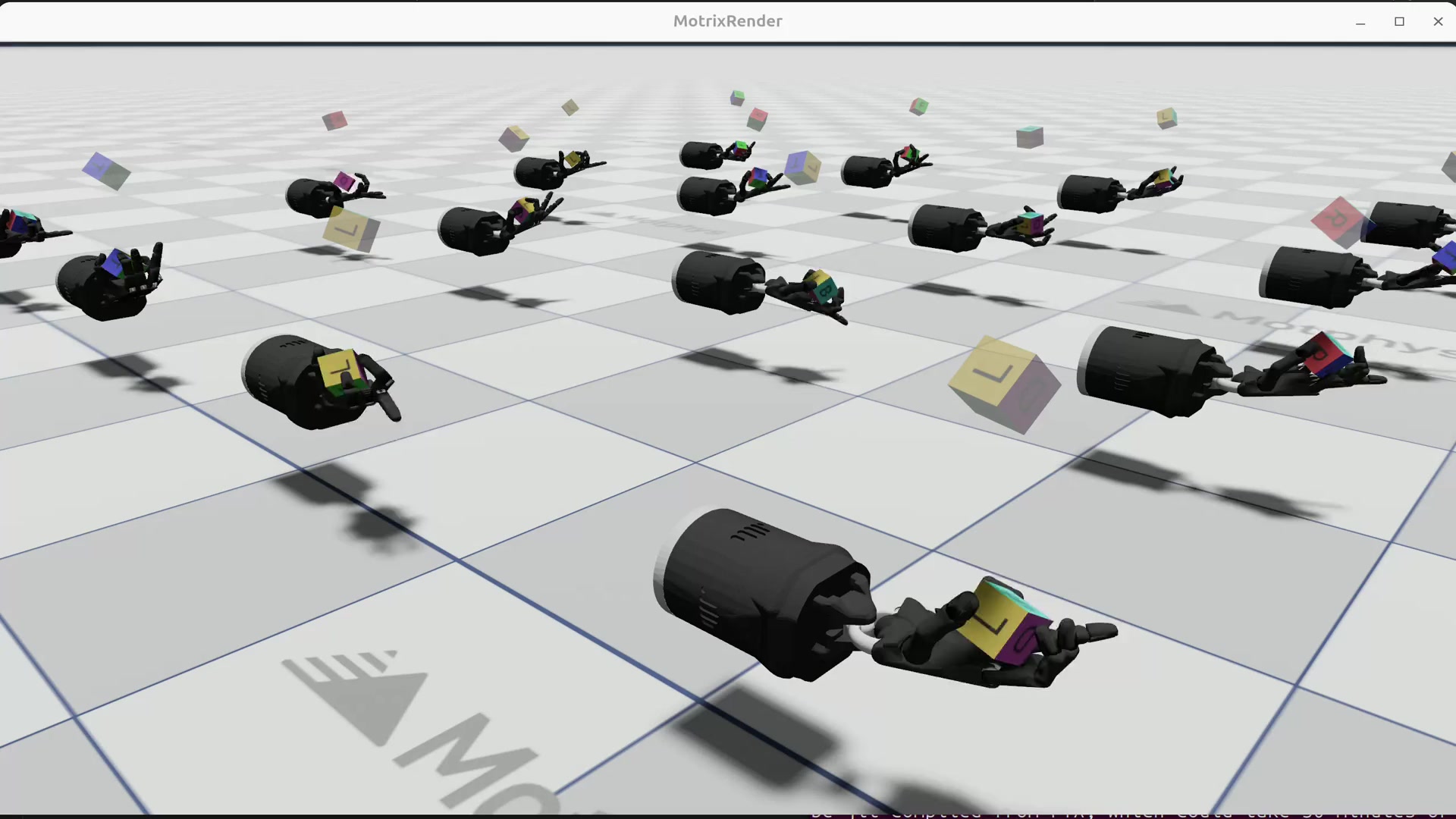
Shadow Hand 方块重定向策略示例,展示如何加载 ONNX 策略并控制灵巧手调整方块姿态。演示视频。按 |
|
|
操作空间控制(OSC)交互示例,展示如何使用 |
|
|
Go1 机械狗多任务策略示例,支持行走、倒立、脚立、起身恢复等多种运动模式切换。WASD 控制移动,U 倒立,I 脚立,O 恢复,P 重置。 |


并行仿真#
展示 |
文件 |
简介 |
|---|---|---|
|
多环境并行仿真。 |

随机化#
展示 |
文件 |
简介 |
|---|---|---|
|
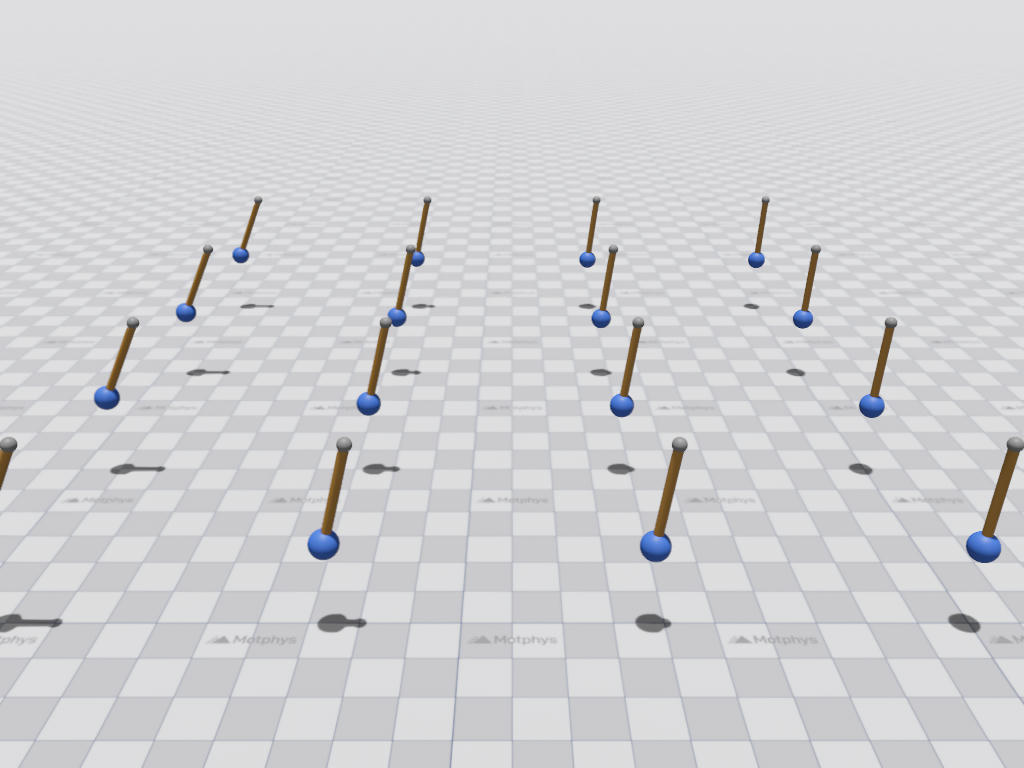
随机化刚体质量,在 16 个并行实例中将质量从 0.1 kg 到 500 kg 变化,展示质量对下落动力学的影响。 |
|
|
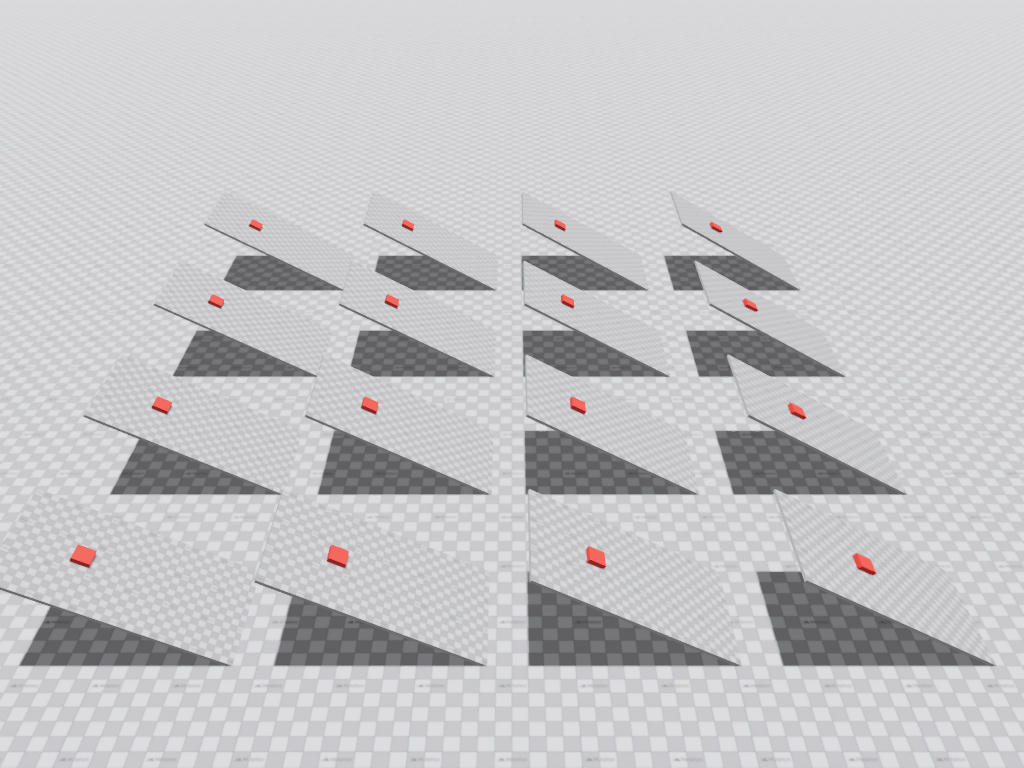
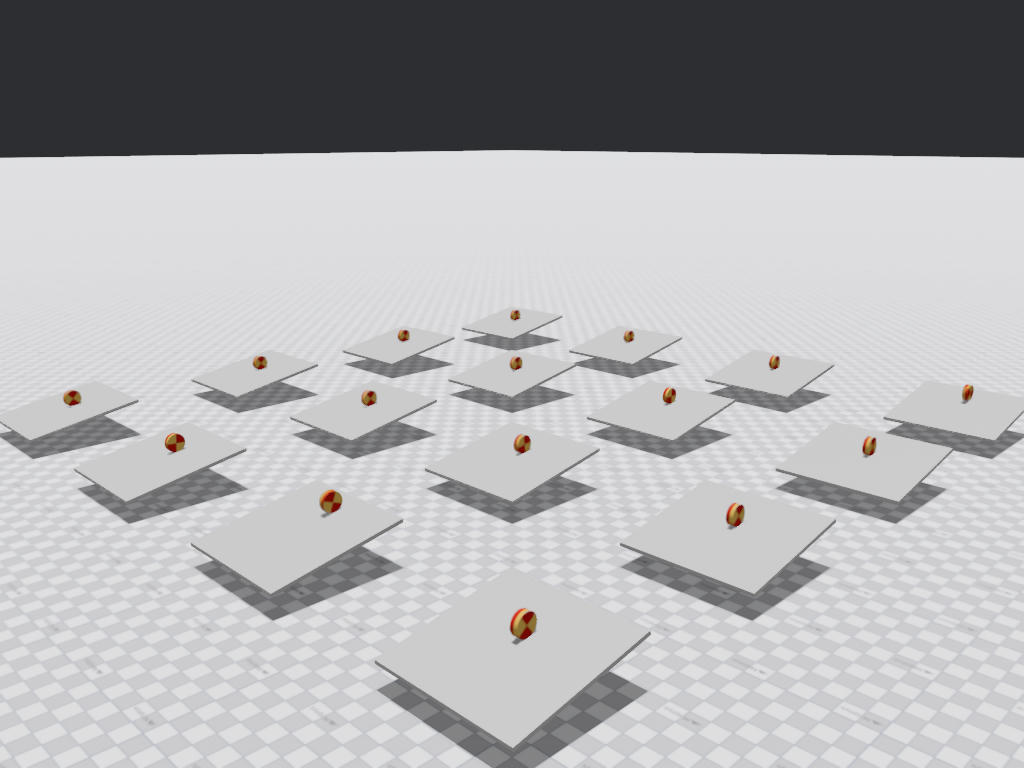
随机化几何体摩擦系数,在 0.01 到 2.0 范围内变化,展示物体在 30° 斜面上从滑动到静止的过渡。 |
|
|
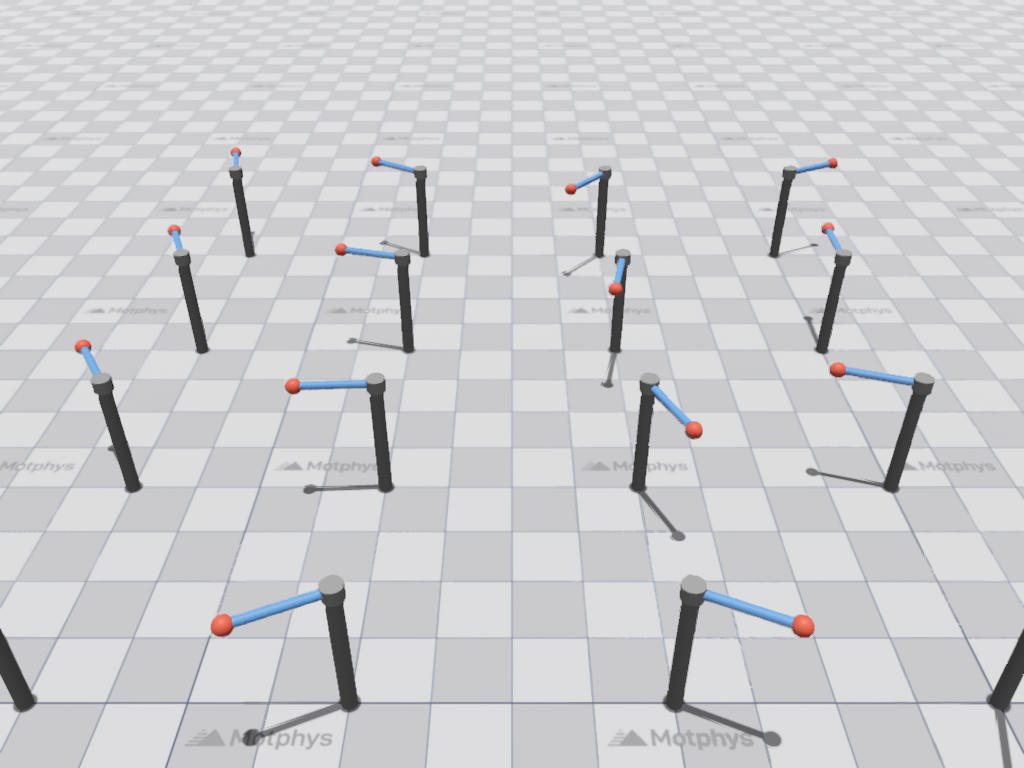
随机化关节转动惯量(虚拟转子惯量),展示 armature 参数对扭转弹簧驱动臂的固有频率的影响。 |
|
|
随机化关节干摩擦力(库仑摩擦),从 0 到 200 N·m 变化,展示摩擦力如何使摆锤在不同角度停止。 |
|
|
随机化质心位置,在圆柱体截面内偏移质心,展示质心偏移对滚动行为的影响。 |
|
|
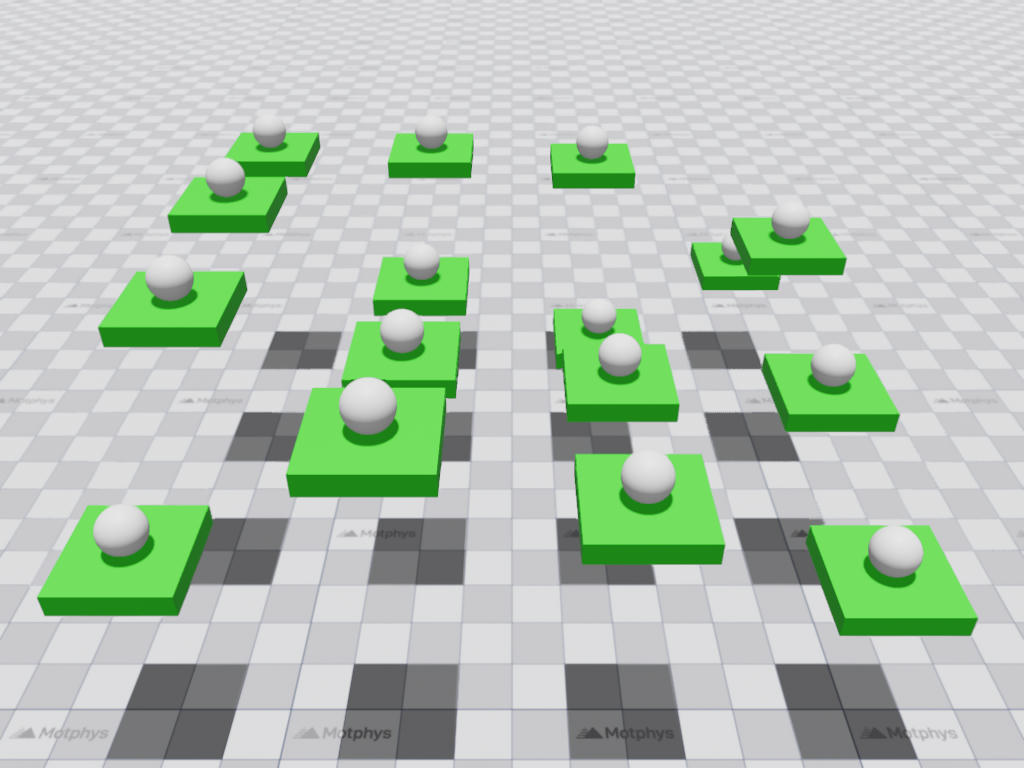
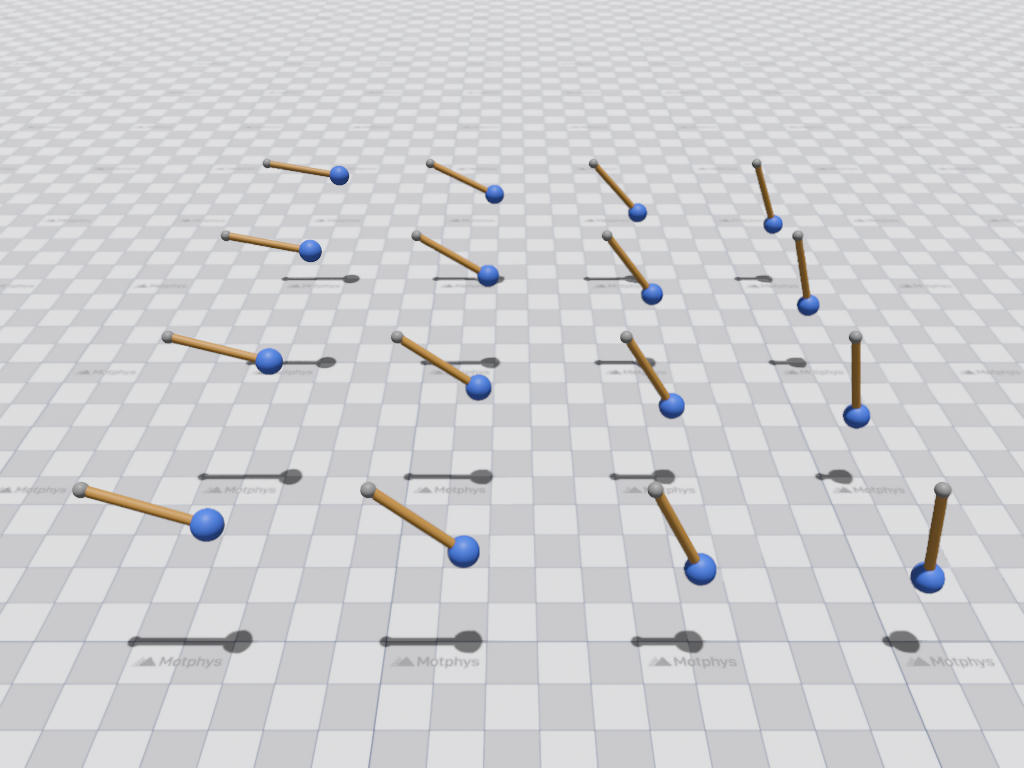
在 4×4 网格中随机化位置执行器的 PD 增益,行方向变化 kp(10–120 N·m/rad),列方向变化 kd(1–20 N·m·s/rad),可视化 PD 伺服动力学。 |
|
|
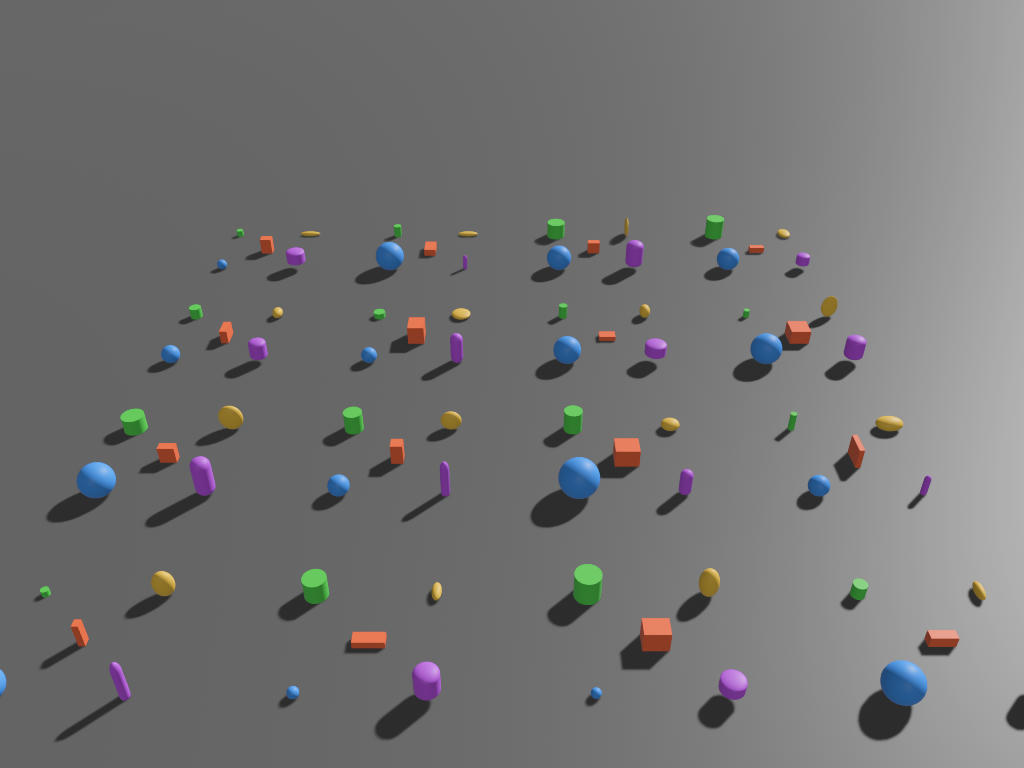
随机化五种几何体(球体、胶囊体、盒体、圆柱体、椭球体)的碰撞和视觉尺寸,展示尺寸对沉降高度和接触行为的影响。 |
|
|
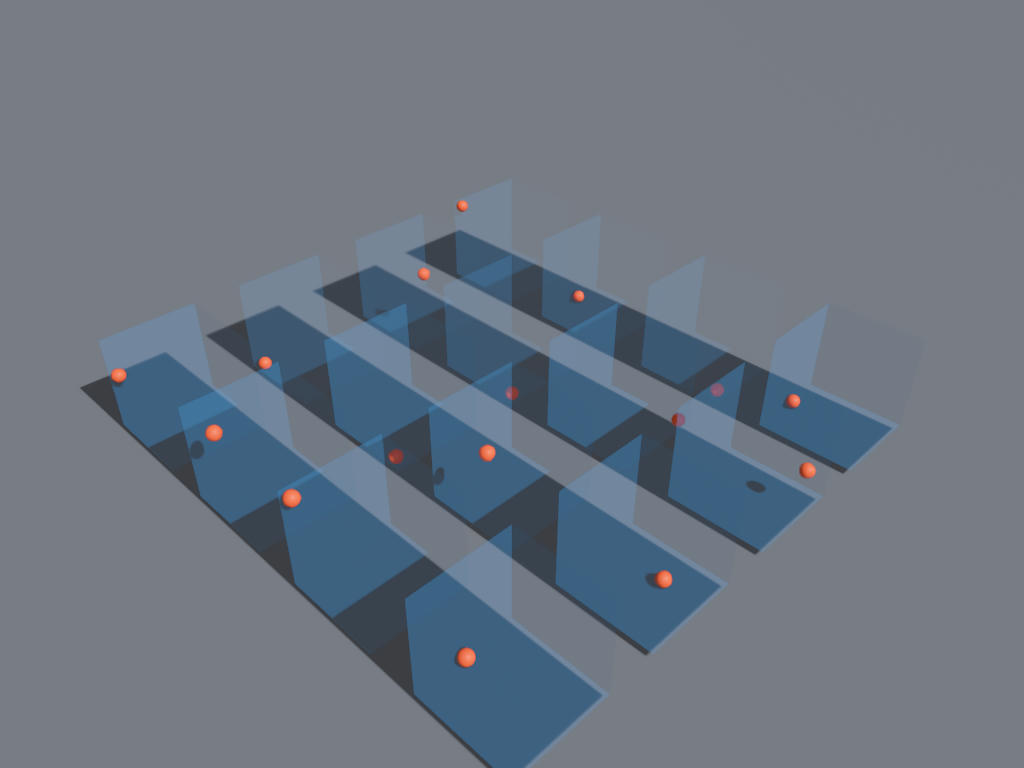
随机化重力方向,在 16 个并行实例的透明盒子中为每个实例设置不同的重力向量,展示 |
可视化与渲染#
展示 |
文件 |
简介 |
|---|---|---|
|
相机控制 API 的使用,展示如何启用/禁用系统相机和场景相机,以及获取相机位姿。 |
|
|
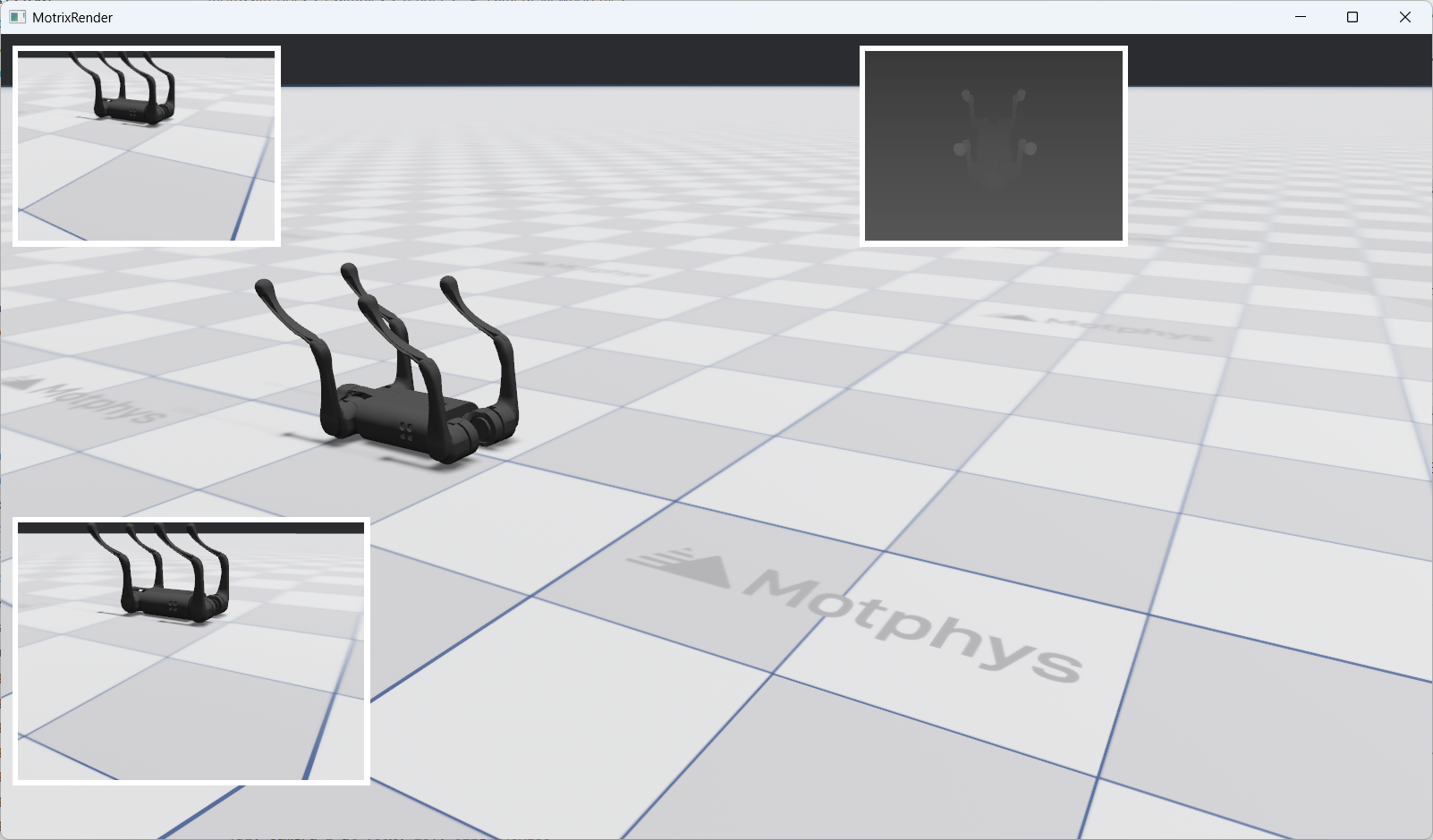
相机视口组件的使用,展示不同相机画面的显示,以及切换相机、调整大小和位置等交互控制。 |
|
|
自定义 UI 元素的使用,展示如何添加按钮和开关等交互控件。 |
|
|
3D 辅助绘图系统的使用,展示如何绘制球体、立方体、胶囊体、箭头、网格等可视化辅助元素。 |
|
|
图像组件系统的使用,展示如何显示和交互操作多个图像面板。 |
|
|
渲染设置配置示例,展示如何使用 |
|
|
批量渲染中的选择性渲染控制,展示如何在多环境并行仿真中动态控制特定场景的可见性。按 A/D 键切换部分场景可见性,Q/E 键控制所有场景。 |
|
|
多环境间的光源共享优化,展示如何在并行仿真中共享光源以提升性能。使用 |
|
|
屏幕空间全局光照(SSGI)渲染示例,展示如何使用 |
|
|
无头渲染示例,展示如何使用 |
基准测试#
展示 |
文件 |
简介 |
|---|---|---|
|
陀螺的物理仿真场景。 |
|
|
零重力环境下的陀螺场景,展示角动量守恒的物理特性。 |
|
|
牛顿摆的物理仿真场景。 |
|
|
Franka Panda 机械臂的抓取与抖动测试,展示机械臂如何抓取物体并保持稳定。支持 |