🎲 参数随机化#
MotrixSim 提供了参数随机化(Domain Randomization)能力,允许您在多环境并行仿真中为每个实例设置不同的物理参数。这对于 Sim-to-Real 迁移和强化学习训练至关重要。
支持的随机化参数总览#
属性 |
对象 |
设置方法 |
获取方法 |
数据维度 |
|---|---|---|---|---|
质量 |
|
|
|
|
质心 |
|
|
|
|
摩擦力 |
|
|
|
|
几何体尺寸 |
|
|
|
|
电枢惯量 |
|
|
|
|
关节摩擦损耗 |
|
|
|
|
比例增益 |
|
|
|
|
阻尼增益 |
|
|
|
|
重力 |
|
|
|
|
备注
所有 override 方法都作用于 SceneData,不会修改 SceneModel 本身。这使得同一个模型可以在不同实例中使用不同的参数。
核心概念#
参数随机化通过 Override API 实现。Override 作用于 SceneData 而非 SceneModel,这意味着同一个模型的不同仿真实例可以拥有不同的物理参数,而无需重新加载模型。
基本使用模式:
# 创建批量仿真数据
data = mtx.SceneData(model, batch=(16,))
# 获取模型对象
link = model.get_link("body_name")
# 设置 override(shape 包含 batch 维度)
mass = np.random.uniform(0.1, 10.0, size=(16,))
link.set_mass_override(data, mass)
# 读取 override
mass_get = link.get_mass_override(data)
支持的随机化参数#
连杆参数#
质量随机化#
通过 Link.set_mass_override 修改连杆质量,影响物体的惯性和重力表现。
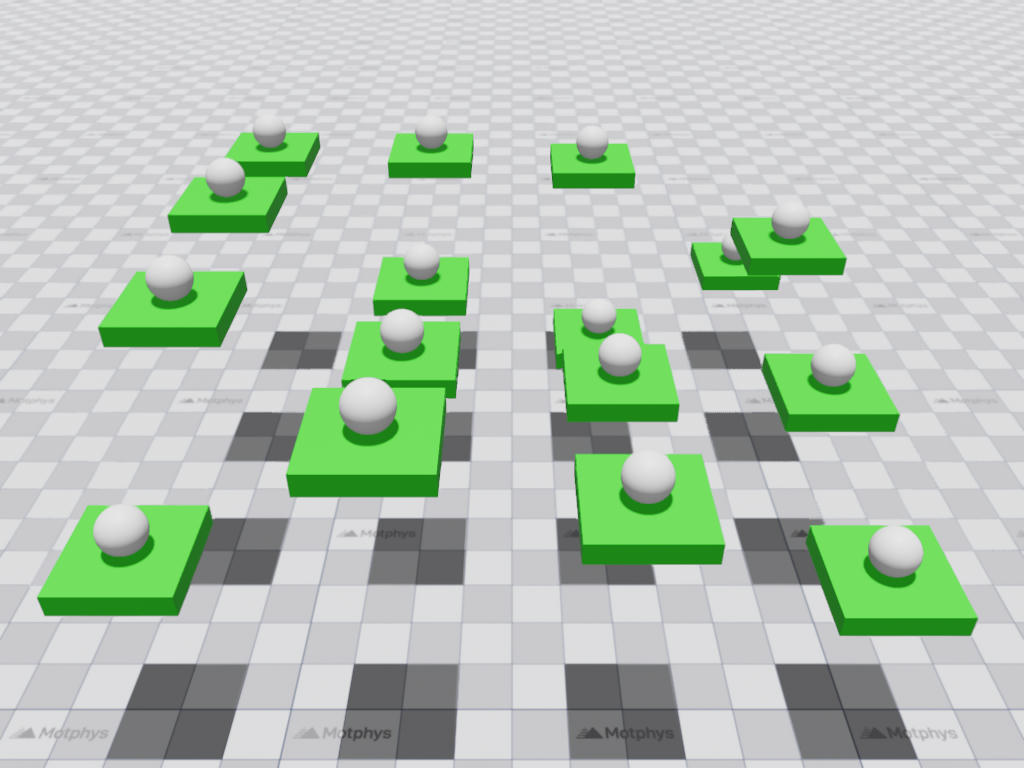
def main():
# Create render window for visualization
with RenderApp() as render:
# The scene description file
path = "examples/assets/randomize/ball_on_box.xml"
# Load the scene model
model = load_model(path)
# Create the render instance of the model
render_offset = []
for i in range(4):
for j in range(4):
render_offset.append([-i * 2, j * 2, 0])
render.launch(model, batch=16, render_offset=render_offset)
render.system_camera.set_view(lookat=[-3, 3, 1.5], distance=10.0, elevation=-35, azimuth=90)
# Create the physics data of the model
data = SceneData(model, batch=(16,))
ball = model.get_link(0)
mass = np.random.uniform(0.1, 500.0, size=(16,))
ball.set_mass_override(data, mass)
mass_get = ball.get_mass_override(data)
assert np.allclose(mass_get, mass)
质心随机化#
通过 Link.set_center_of_mass_override 修改连杆质心位置,影响物体的旋转行为和稳定性。
com_offset = np.zeros((16, 3), dtype=np.float32)
com_offset[:, 0] = np.random.uniform(-0.25, 0.25, 16)
link.set_center_of_mass_override(data, com_offset)
几何体参数#
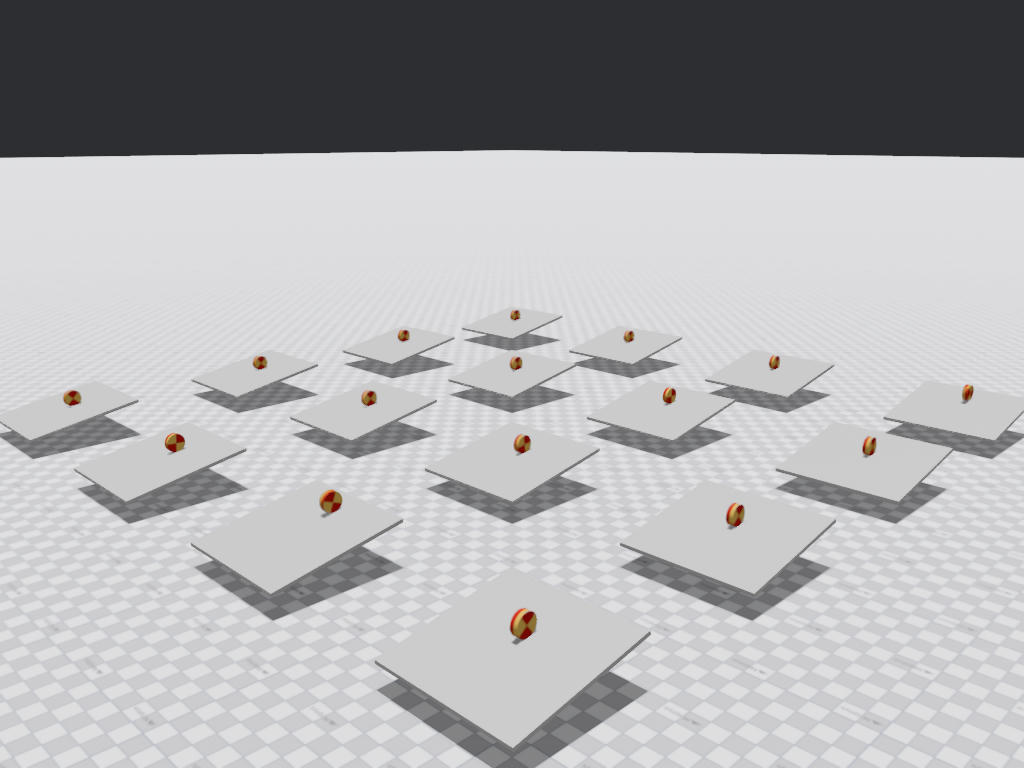
摩擦力随机化#
通过 Geom.set_friction_override 修改几何体的摩擦系数。摩擦系数是一个 3 维向量 (slide, spin, roll)。
geom = model.get_geom("box_geom")
frictions = np.zeros((16, 3), dtype=np.float32)
frictions[:, 0] = np.linspace(0.01, 2.0, 16) # slide friction
geom.set_friction_override(data, frictions)
几何体尺寸随机化#
通过各几何体子类的 set_size_override 方法修改碰撞体尺寸。不同几何体类型的 size 维度不同:
几何体类型 |
size 维度 |
含义 |
|---|---|---|
|
1 |
半径 |
|
2 |
半径, 半高 |
|
3 |
X/Y/Z 方向半长 |
|
2 |
半径, 半高 |
|
3 |
X/Y/Z 方向半径 |
from motrixsim import GeomSphere
sphere = model.get_geom("sphere")
assert isinstance(sphere, GeomSphere)
radii = np.random.uniform(0.1, 0.8, size=(16, 1)).astype(np.float32)
sphere.set_size_override(data, radii)
关节参数#
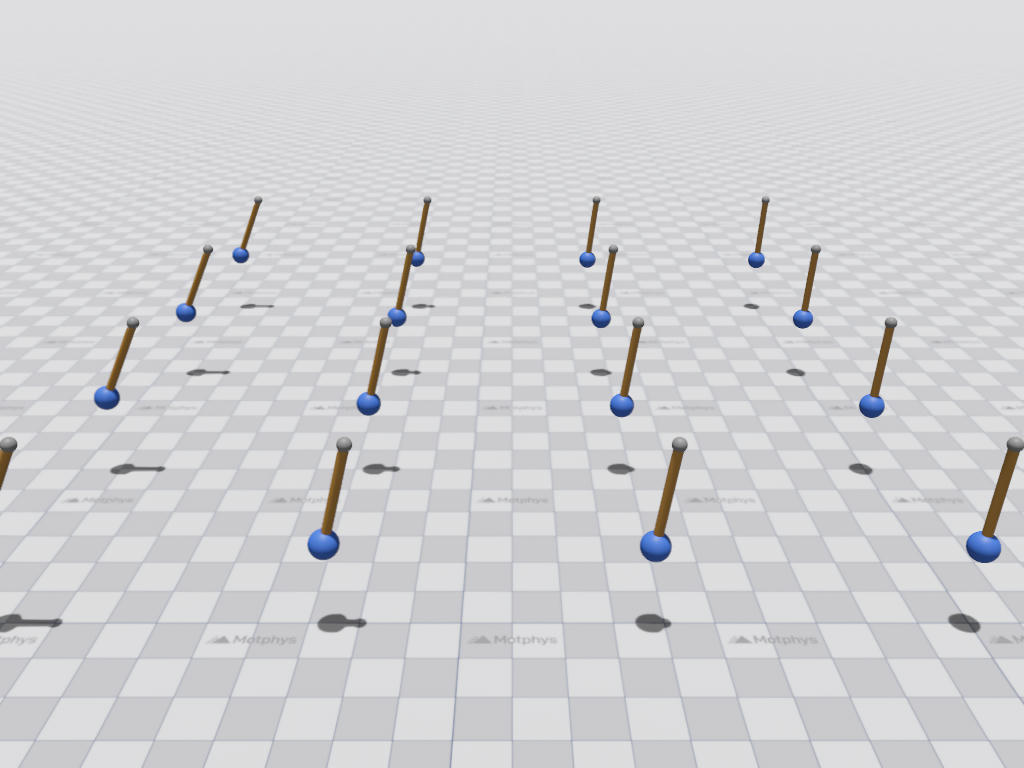
电枢惯量随机化#
通过 Joint.set_armature_override 修改关节的电枢惯量(虚拟转动惯量),影响关节的动态响应速度。
joint = model.get_joint("rotor_joint")
armature = np.linspace(0.1, 5.0, 16).astype(np.float32)
joint.set_armature_override(data, armature)
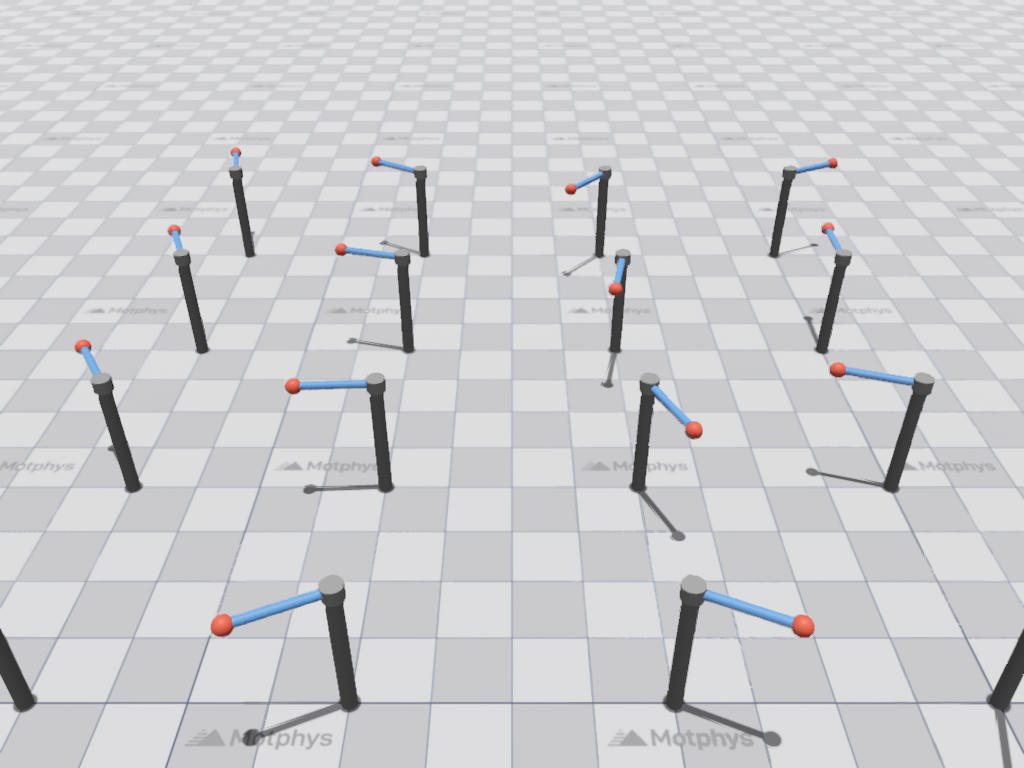
关节摩擦损耗随机化#
通过 Joint.set_frictionloss_override 修改关节的库仑干摩擦,影响关节的阻力特性。
joint = model.get_joint("pendulum_hinge")
frictionloss = np.linspace(0.0, 200.0, 16).astype(np.float32)
joint.set_frictionloss_override(data, frictionloss)
驱动器参数#
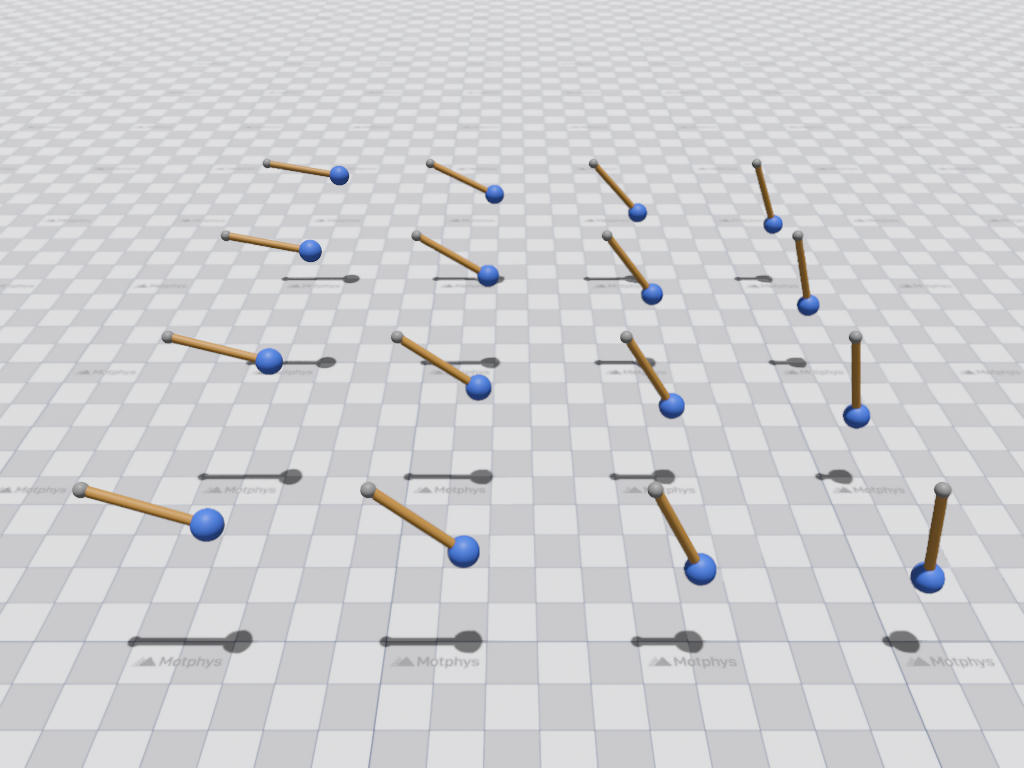
Kp/Kd 随机化#
通过 Actuator.set_kp_override 和 Actuator.set_damping_override 修改位置驱动器的比例增益和阻尼增益。
actuator = model.get_actuator("servo")
kp = np.array([10.0, 30.0, 60.0, 120.0], dtype=np.float32)
kd = np.array([1.0, 3.0, 8.0, 20.0], dtype=np.float32)
actuator.set_kp_override(data, kp)
actuator.set_damping_override(data, kd)
场景参数#
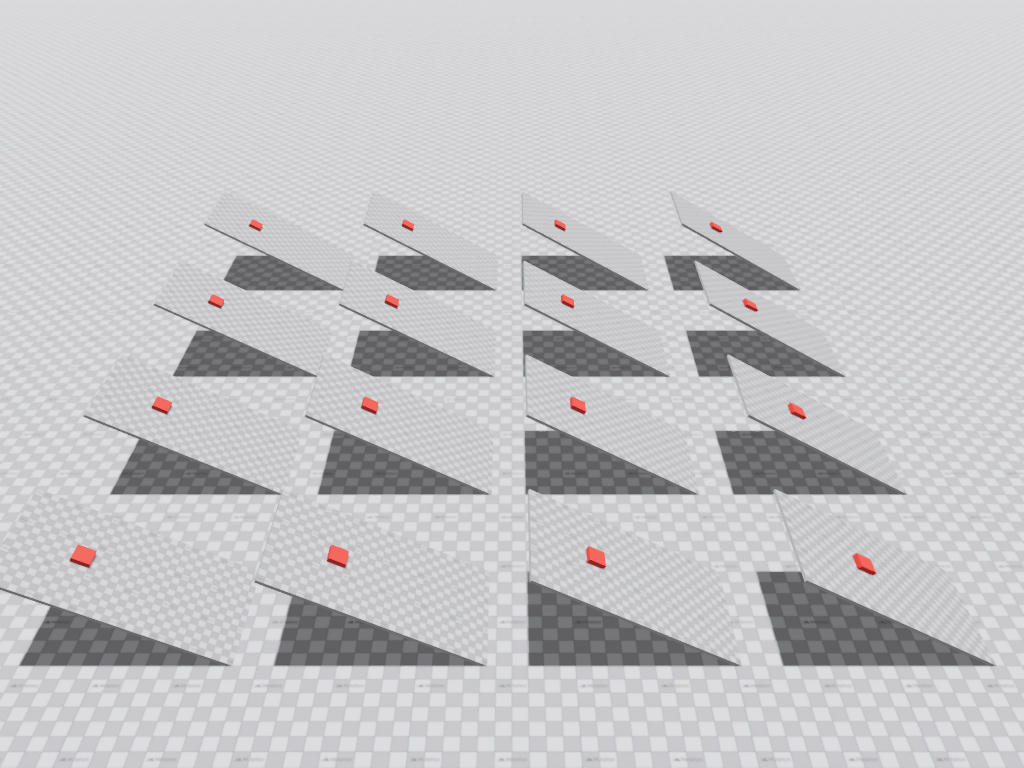
重力方向随机化#
通过 SceneModel.set_gravity_override 修改每个实例的重力向量。
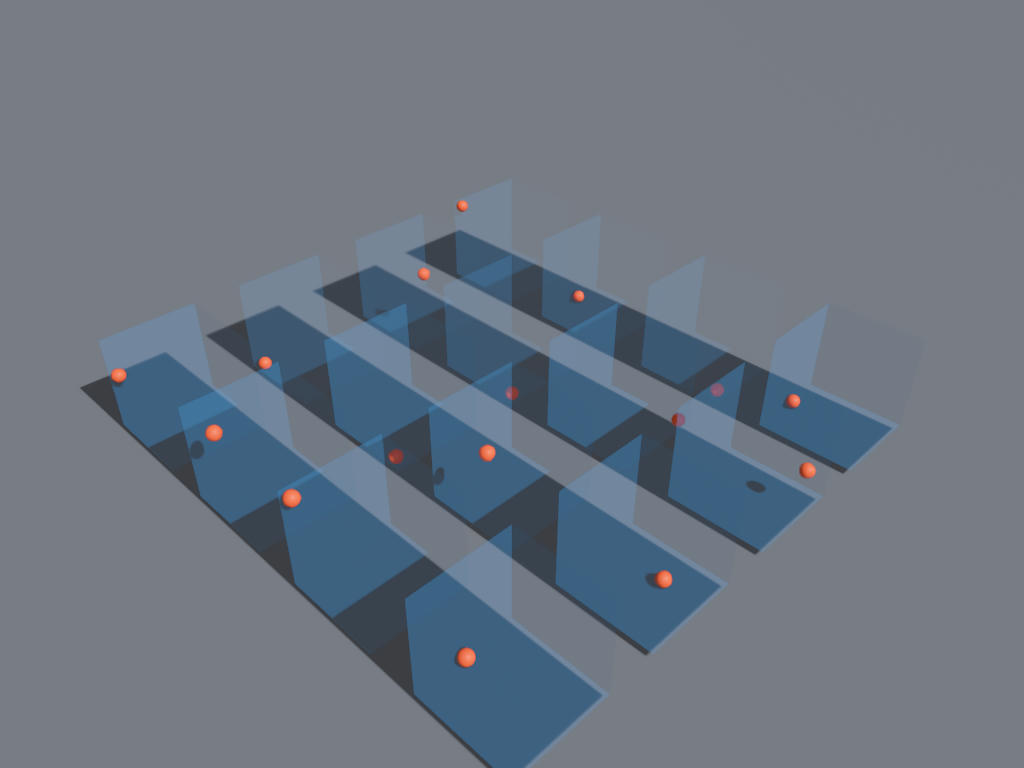
gravity = np.random.randn(16, 3).astype(np.float32)
gravity /= np.linalg.norm(gravity, axis=1, keepdims=True)
gravity *= 9.81
model.set_gravity_override(data, gravity)