📚 示例程序#
我们提供了一系列示例程序帮助您从零开始掌握 MotrixSim 的使用方法。您可以通过
pdm run examples/{example_name}.py
来运行您感兴趣的示例
基础入门#
展示 |
文件 |
简介 |
|---|---|---|
|
创建空场景,相当于 Hello World 示例。 |
|
|
小球在重力作用下下落,展示如何创建 |

API 演示#
展示 |
文件 |
简介 |
|---|---|---|
|
获取和配置 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
使用 |
|
|
|
|
|
摩擦力配置的场景。 |
|
|
多环境并行仿真。 |
|
|
展示如何使用 MotrixSim 内置的 IK 模块进行逆运动学求解。 |


交互控制#
展示 |
文件 |
简介 |
|---|---|---|
|
使用键盘操控小车移动,展示键盘事件的使用。使用 W 键向前移动,S 键向后移动。 转向:使用 A 键向左转,D 键向右转 |
|
|
使用鼠标点击地面移动小球,展示鼠标事件的使用。 |

物理仿真#
展示 |
文件 |
简介 |
|---|---|---|
|
陀螺的物理仿真场景。 |
|
|
零重力环境下的陀螺场景,展示角动量守恒的物理特性。 |
|
|
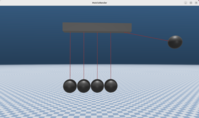
牛顿摆的物理仿真场景。 |
|
|
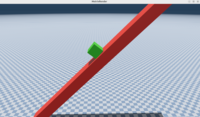
方块在斜坡上滚动的物理仿真模型。 |
|
|
由简单几何形状和 |
|
|
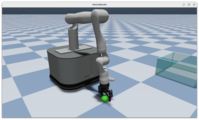
使用吸附功能的机械臂。 |


机器人应用#
展示 |
文件 |
简介 |
|---|---|---|
|
go1 机械狗的随机运动,展示如何引入神经网络和使用 |
|
|
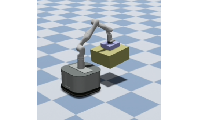
斯坦福机械臂使用移动命令序列进行小球的抓取与摆放。 |